论文笔记-End-to-End Object Detection with Transformers
论文链接:https://arxiv.org/abs/2005.12872
1. 前言
目标检测一直以来都是CV领域的重要分支,在DETR出现之前,不论是anchor based方法、proposal based方法,还是anchor free方法,都至少需要非极大值抑制(Non-maximum suppression, NMS)来去除最后生成的很多anchor,而含NMS的方法调参和部署都比较困难,因此当时的方法仍然不足够“端到端(end-to-end)”。Detection Transformer的目的就是使用Transformer的全局建模能力,为端到端目标检测提供一个开端。
2. 摘要
DETR将目标检测看作一个集合预测问题,因此不需要NMS来处理预设的anchors,极大减少了对先验知识的依赖。DETR运用了基于集合的全局损失,并通过二分图匹配强制模型对每个物体只输出一个预测,并且使用了Transformer encoder-decoder的结构。此外DETR通过在解码器端设置可学习的object queries,结合图像的全局信息来直接并行地输出最后的预测框。DETR最大的优点就是简单,虽然没有拿下当年的SOTA,但在COCO数据集上也可以和Faster RCNN打成平手。这种端到端的形式也引起了研究者们极大的兴趣。后来拿下COCO test-dev数据集SOTA的DINO,Group DETR等都是基于DETR的改进方案,可见DETR在目标检测领域的潜力。
3. 引言
现有的检测器,比如proposal based的Faster RCNN,Mask RCNN和Cascade RCNN,再比如anchor based的YOLO,Focal loss等方法最后都会生成一系列的预测框,再通过NMS操作去掉多余的框,也就是说这些检测器至少是two-stage的,因为NMS这一步属于post processing steps。DETR提出了一个简单的端到端结构,大幅度简化了前向过程,但由于Transformer这一结构本身比较庞大,还处在雏形的DETR并不能在速度上超越基于卷积网络的RCNN系列。但正如作者所说,DETR最大的优点就是简单,可拓展性强。
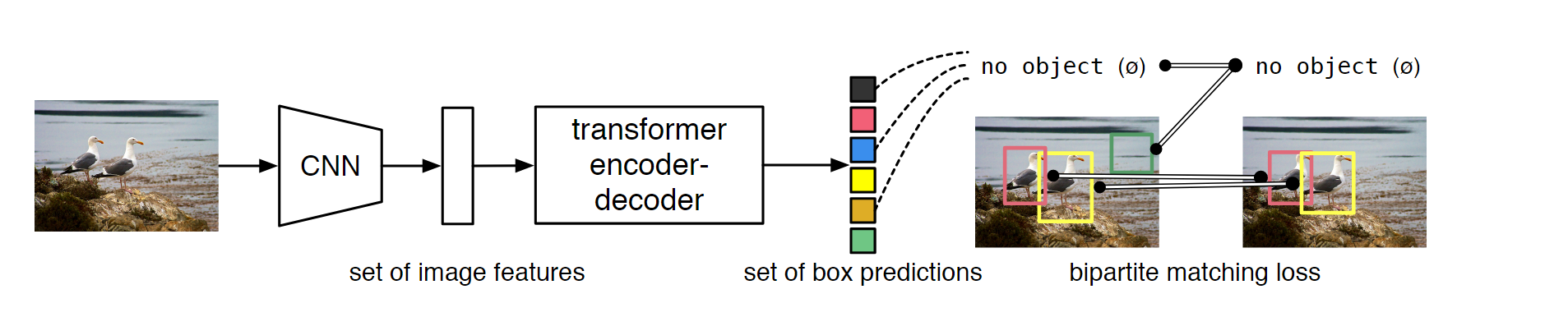
引言中给出了DETR的简化版结构,输入图像首先经过一个CNN得到特征图(原文中用了Res50和Res101),然后输入一个标准的ViT编解码器,输出就是边框预测和类别,具体而言就是用线性层做维度投影,一个是类别投影,输出维度为类别数,另一个是边框投影,输出维度始终为4,代表边框的中心点和宽高
4. 方法
4.1 Object detection set prediction loss
集合预测损失是DETR最重要的两大贡献之一。DETR会输出固定大小的预测集合,这个集合中的子集元素就是分类结果和预测框,注意这里的集合大小linear_sum_assignment函数能直接输出最优方案,scipy.optimize.linear_sum_assignment的输入为代价矩阵(cost
matrix)。对于目标检测而言,代价矩阵中的cost元素就对应的损失值,每一个cost的计算方式如下,其中
实际上这个损失函数与传统目标检测函数相同,第一项是分类损失,第二项是边框损失。有了每一项的损失,就可以计算出总体损失,只需要简单的对所有预测集合求和即可。实际上作者在实现的的过程中去掉了第一项的
得到最佳匹配之后就知道生成的100个框中与GT最匹配的框了,然后就可以与GT做进一步的损失计算做反向传播。原文对这种方法也做了进一步解释,实际上这种寻找最有匹配的方法思想上与利用先验知识匹配proposal和anchors的方法相同,但这里约束性更强,强制模型输出一对一的匹配关系,去掉了后续的NMS操作。
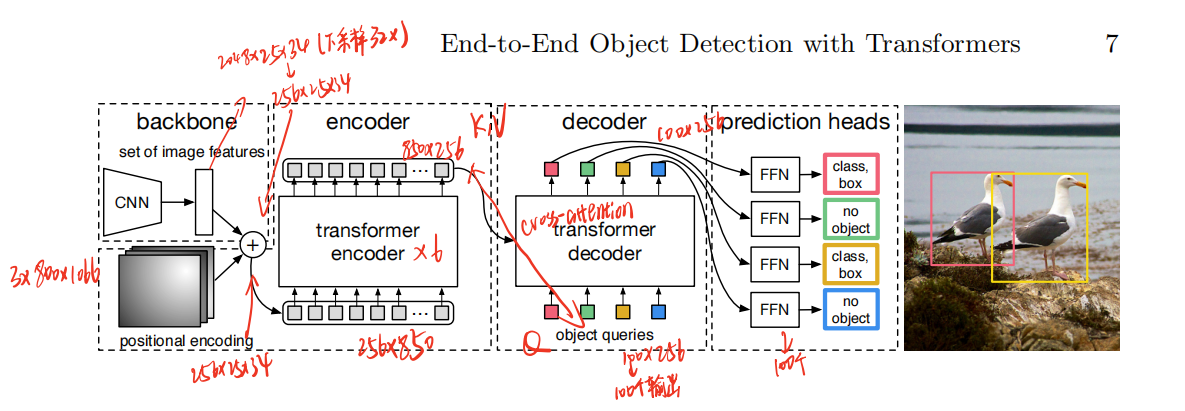
4.2 DETR模型架构
方法中给出的模型架构比较详细,为了方便描述,我们假设输入维度为
Object queries实际上表示的是目标类别的位置编码,在预测时,每个object query与encoder的输出特征进行匹配,以此确object query与特征图中哪个位置相对应。
4.3 DETR代码实现
原文中直接给出了DETR的Pytorch代码实现,非常的简洁优雅。
1 | import torch |
5. DETR的优缺点
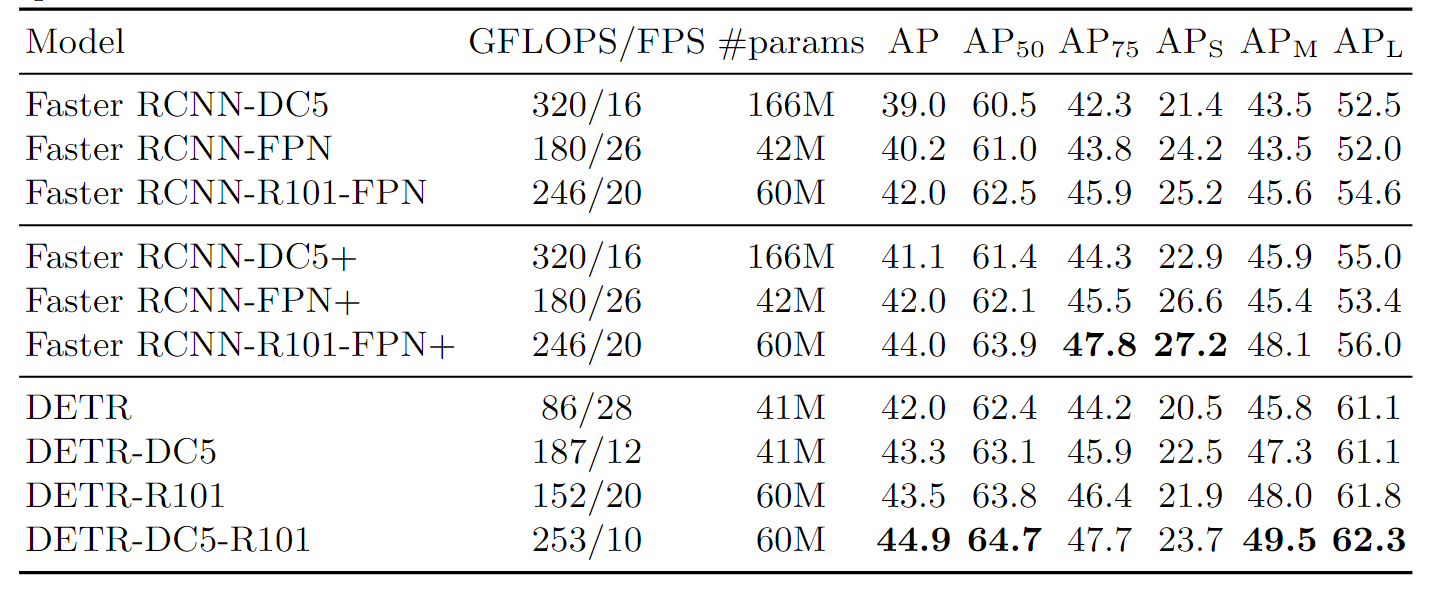
DETR的优点在于简单,端到端的学习也提供了其他的可拓展性。此外DETR对大物体的检测非常准确,这可能是DETR没有限制anchor尺寸,并且Transformer的全局建模能力较强。但是DETR的推理速度远跟Faster RCNN系列还是有差距,同等模型参数量大小下的推理速度约为Faster RCNN的一半,而且DETR初版的训练时间非常长,作者一共训练了500个epoch,而平常只需要几十个epoch就差不多了。
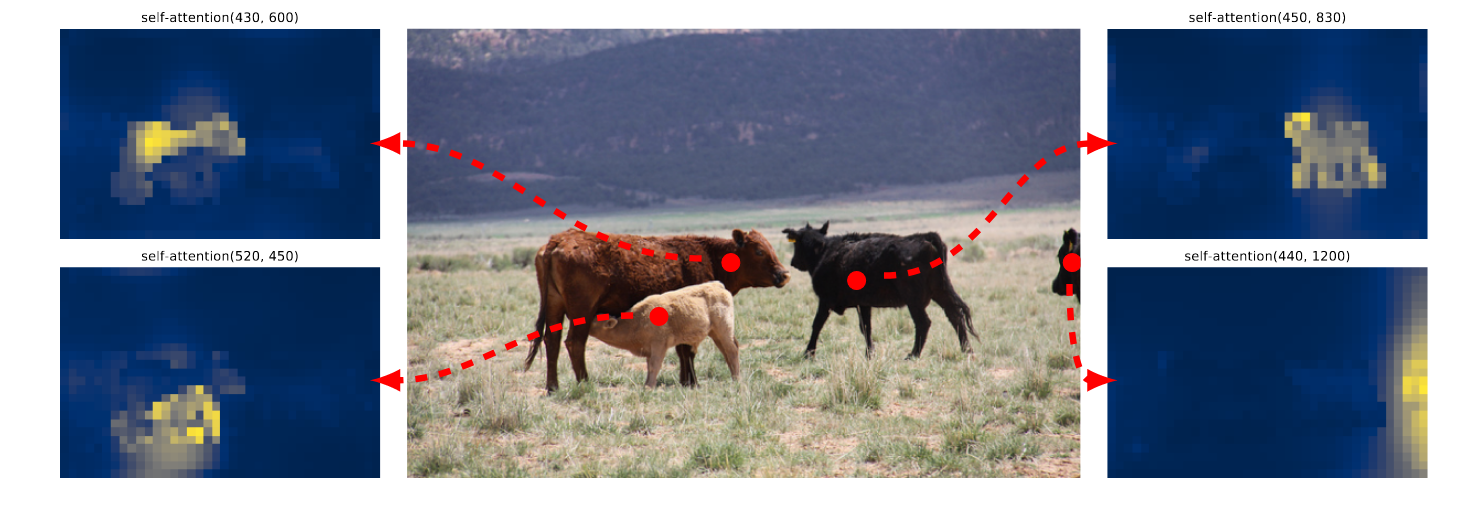
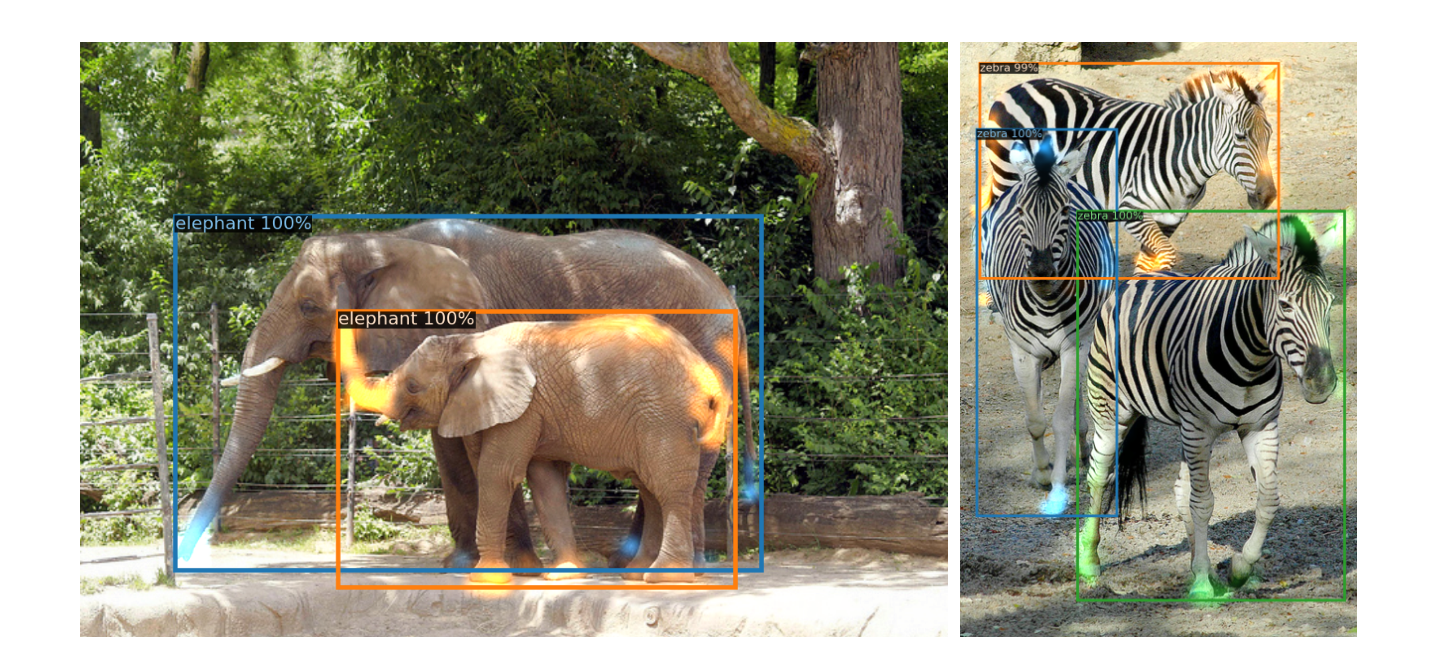
从作者的可视化结果中可以看出,DETR的encoder主要学习了全局特征,让主要物体尽可能分开,但细节轮廓则需要decoder去学习。从结果中可以看出encoder和decoder对遮挡问题都处理得很好。
6. 总结
DETR作为当年新的结构,能在COCO数据集上与Faster RCNN基线打成平手,并且在大物体检测和分割任务上取得了更好的效果,缺点就是训练太慢,推理时间太长,小物体检测性能也较差。但DETR在当年作为最具潜力之一的ECCV论文,引起了极大的热度。后续的诸如Deformable DETR,DINO,Group DETR等基于它的工作层出不穷,足以见其在目标检测领域的影响力。