论文笔记-TrackFormer:Multi-Object Tracking with Transformers
论文链接:http://export.arxiv.org/pdf/2101.02702v3.pdf 开源链接:https://github.com/timmeinhardt/trackformer
0. 写在前面
Transformer能应用到多目标跟踪(Multi-object Tracking, MOT)领域很大程度上得益于DETR的成功,TrackFormer就是其中之一。TrackFormer是21年1月挂在arxiv上的文章,其作者团队也包含了DETR的主要作者,只能说是原班人马倾力打造了。
之前也对DETR进行过解读:论文笔记-End-to-End Object Detection with Transformers
1. 摘要
摘要第二句话直接说明将MOT视作一个集合预测问题(set prediction problem),所谓集合预测问题,就是直接让网络输出最终结果,而不需要任何后处理。DETR也是将目标检测视作集合预测问题,相比于以前的目标检测模型,DETR不需要NMS这一步,极大减少了后处理复杂度。作者也将这个思想带到了TrackFormer当中。紧接着作者提到TrackFormer使用的decoder可以从静态的object queries中初始化新的tracks,然后使用保留身份(identity preserving)的track queries在空间和时间上自动回归地跟踪现有的tracks。这两种query都受益于全局性帧级别特征的self-attention机制,从而可以省去任何图优化(graph optimization)和运动/外观建模(modeling of motion/appearance feature)。
最后说明结果,在当时的MOT17、MOT20和分割数据集MOTS20上取得了SOTA。
2. 引言
当前MOT的主流方法仍然是遵循tracking-by-detection的二阶段范式,tracking-by-detection的两个步骤可以概括为:(1) 检测视频中的对象;(2) 对检测到的对象进行帧间的数据关联并创建它们的轨迹(例如DeepSORT中的卡尔曼滤波与级联匹配)。而最近的工作提出了一种新的范式:tracking-by-regression,这种方法让检测器不仅输出检测到的对象,而且将原来的数据关联方法替换为对跟踪轨迹进行连续的回归操作。
以上是作者对于之前MOT工作的大致总结,接下来作者就提出了新的tracking-by-attention的范式。不仅仅是在数据关联的时候使用attention,而是将detection和tracking联合起来,真正做到端到端跟踪。
整个TrackFormer都是建立在DETR的基础之上的,DETR的核心就是给解码器引入object query,让其负责表示检测目标的分类与位置信息。要想将DETR应用到跟踪任务,最直接的想法就是引入新的query来负责跟踪,作者将其命名为track queries。当新的目标进入到画面时,新的object queries就会出现,并将在后续被转化为track queries。最后将object queries和track queries同时输出为bounding boxes,并不需要像tracking-by-detection一样需要做track与detection之间的匹配。
作者将本文的贡献总结为如下三个方面:
提出了一个端到端的目标跟踪范式,这个范式下可以将检测与数据关联联合起来。
提出了一种自回归track queries的概念,这种queries可以保存空间信息和id信息,所以能在时间和空间上追踪目标。
在MOT17,MOT20和分割数据集MOTS20达到了SOTA。
2. 相关工作
相关工作中作者主要对当前几大主流的track-by-X(X = detection, regression, segmentation)和ViT做了回顾。这里就不过多介绍了。
3. TrackFormer
这一节主要介绍了如何将MOT视作一个集合预测问题以及TrackFormer额核心思想。
3.1 MOT as a set prediction problem
作者用以下四步将MOT转换为了集合预测问题,本质上讲就是一个vanllina transformer的思想。
对每帧用CNN进行特征提取
用Transformer encoder对每帧的特征进行self-attention编码
用Transformer decoder中的self-attention和cross-attention对queries进行解码
用MLP将box和class信息回归出来。
3.2 Tracking-by-attention with queries
这一部分开始进入TrackFormer的核心部分,我们直接从结构图入手
整个Transformer结构有两种queries:静态的object
queries(白色框框),共
首先是初始化部分,从图中可以看出,在
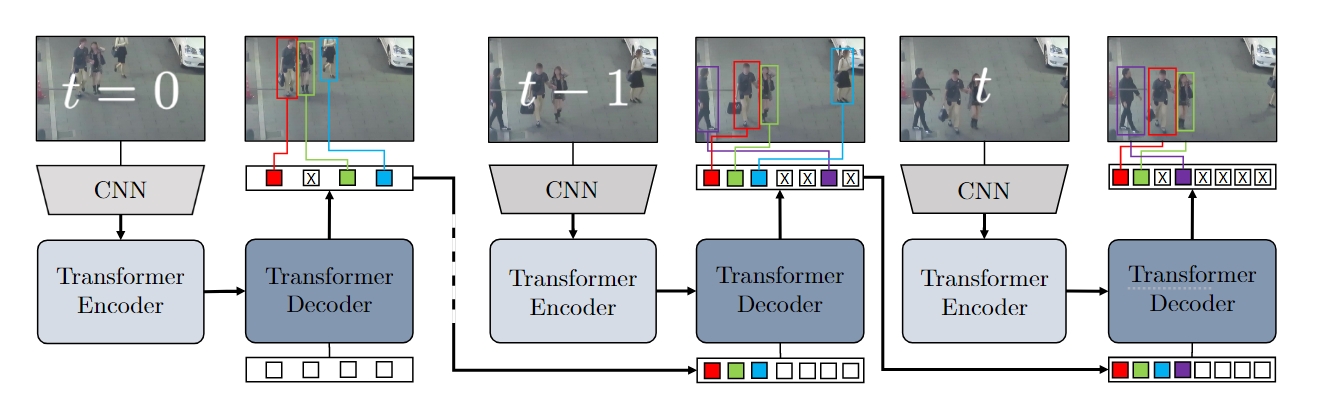
总体而言,TrackFormer的前向过程可以分为以下几步
- 在第一帧直接使用DETR检测,生成第一次的tracks和对应的track queries
- 后续帧中,decoder的输入为当前帧中新的object queries(用于检测)和上一帧(或几帧)中保留下里的track queries(用于跟踪)
- 如果由object queries输出的框大于阈值
则认为新目标进入了画面,如果track queries的置信度小于 则认为跟踪停止。对于严重遮挡的情况可以使用NMS来消除(应该是对track queries的box进行NMS)
3.3 训练
训练的loss函数由两个部分组成,一个是检测损失,一个是跟踪损失,与DETR相比,不同的地方在于第二帧的匈牙利匹配这一步。整个系统一次输入为两帧图像,第一帧检测部分完全用DETR的匈牙利匹配方式计算损失,第二帧将track queries和object queries分开处理。
对于track queries,假设有一个匹配关系
:track query部分在前一帧已经分配了对应gt的id,在当前帧看gt中这些id是否依然存在,若存在(t-1和t中都有),则继续将该id的gt分配给该track query : 若不存在(t-1中有而t中没有),说明目标离开了画面,则该track query被认为是背景类 : t中有而t-1中没有,说明出现了新的目标,需要使用DETR的思路把未分配的id用匈牙利匹配分配给object queries。
最终的loss函数如下,其中
3.4 内部结构
最后来看一下TrackFormer内部怎么实现的
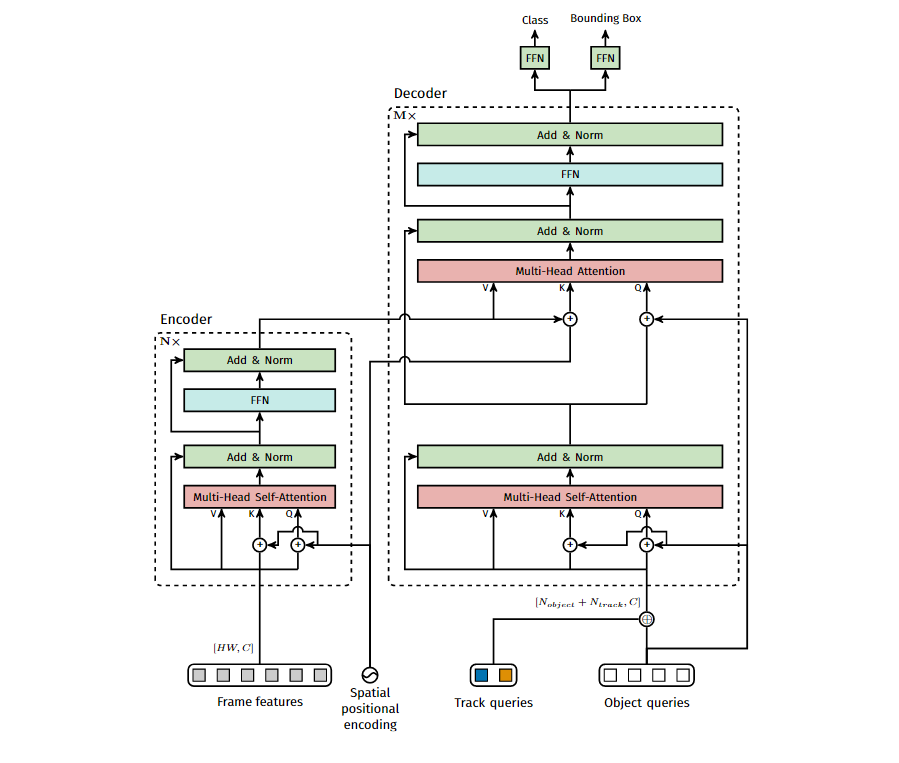
其实很简单,就是直接把track queries直接concatenate到object queries上,其余操作跟DETR完全一样。所以只用了一个decoder就可以了。
总结
TrackFormer这篇文章的方法比TransTrack优雅的多,TransTrack更像是把卡尔曼滤波直接换成一个Transformer decoder,而TrackFormer则是真正意义上的实现了端到端的跟踪。不过个人对这篇文章写作有些不太喜欢,有些地方写的有些晦涩,符号阐述也不清楚,尤其是最后介绍二分匹配和训练的时候,花了很大的功夫才看懂。