随机信号处理笔记-第二章:维纳滤波
维纳滤波的本质是最小化期望信号与系统输出信号之间的均方误差,是一种线性滤波器,可以与最小二乘线性预测那一套方法相关联。
1. 滤波、预测和插值
通过目标信号与当前信号的时间关系确定属于滤波、预测或者插值
已知
2. 维纳滤波的时域解
2.1 最小均方误差
最小均方误差(Minimum Squared Error)定义为期望信号与输出信号差值的平方
要求MSE最小,可以用上式对
令上式等于0,即可得到最优
2.2 时域维纳滤波
2.2.1 维纳霍夫方程
维纳霍夫方程(Wiener-Hopf Equation)表示的是输入的自相关和输入输出之间的互相关之间的联系
其中
其中
2.2.2 非因果IIR维纳滤波
求解
注意:
因果IIR维纳滤波将在第3节与白化滤波器一起介绍
2.2.3 FIR维纳滤波
回顾代价函数MSE,若把有限长输入信号与滤波器都写为向量的形式
则2.2.1中的代价函数可写为
因为
因此,关于滤波器
注意:式中所有项都是标量,因此
令上式等于0,可得出FIR维纳滤波的时域解
上述方式是通过求导来得到维纳滤波器的最优解。实际上,观察
可以直观看出当
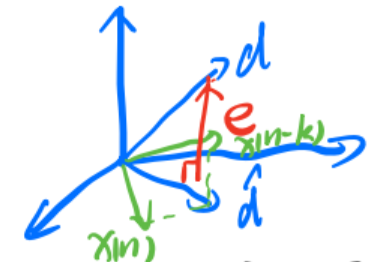
2.2.4 正交性原理
2.2.1中,为了求得最佳滤波器,令误差对滤波器的偏导数等于0,等价于下式
这是正交性原理的第一个核心表达式。从该式可以得知,MSE最小时
令输出信号为
这是正交性原理的第二个核心公式。
正交性原理可以总结为:
- 误差
与观测数据 正交 - 误差
与估计信号 正交
正交性原理与MSE之间互为充要条件,即33
从图中也可以直观理解,只有当误差
3. 维纳滤波的频域解
3.1 因果IIR维纳滤波
本节主要考虑输入信号为白噪声
白噪声的特点是自相关矩阵
将白噪声的自相关矩阵带入维纳滤波的时域解有最佳滤波器(用
对其进行
将
3.2 白化滤波
3.1中假设了输入

这里
根据相关卷积定理和自相关与卷积的关系可得
证明:
根据相关卷积定理:
现在,我们可以采用相同的方式用白噪声得到期望信号
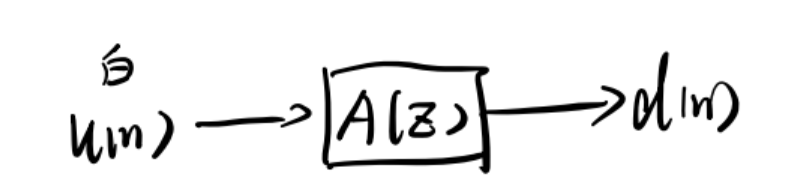
那么就可以得到基于白化滤波器的维纳滤波器,整个系统如图所示(画的有点潦草但应该还看的清orz)

这个系统的意思是,假设用
显然有
可以证明
例:证明
证: 命题等价于证明:
将
两边同时做
3.3 非因果维纳滤波器的简单分析
2.2.2节介绍了非因果IIR形式的维纳滤波,这里主要从画图的角度分析一下非因果滤波器的形式。
首先需要知道非因果滤波器
因为噪声与期望信号是无关(
同理可得
第二个公式可以简记为和的自相关=自相关的和。
根据相关卷积定理
用
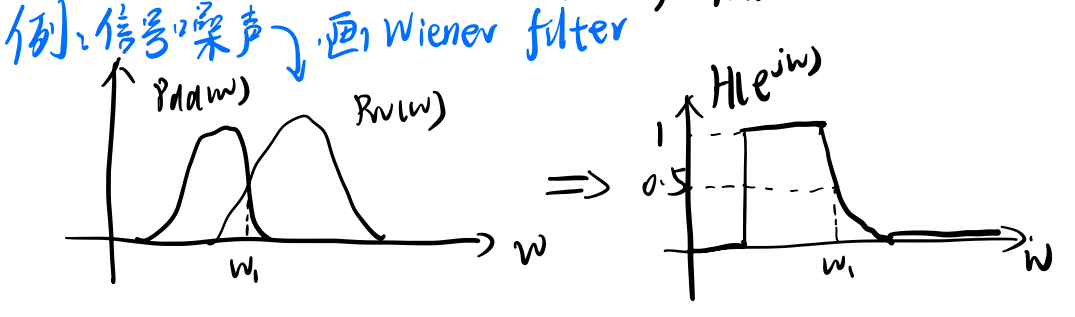
简而言之,就是有信号就开,没信号就关,没噪声就全通,有噪声就降幅度
3.4 一道例题
设计白化滤波器,使其具有功率谱为
思路:凑形式,待定系数求
解:
回顾
替换
我们知道白化滤波器的倒数一定具有
直接令
因此
最后记得倒一下
4. 维纳滤波器小结
| 含义 | 公式 |
|---|---|
| 最佳因果FIR维纳滤波 | |
| 最佳非因果IIR维纳滤波 | |
| 最佳因果IIR维纳滤波 | |
| 均方误差表达式 | |
| 最小均方误差 | |
| 正交性原理 |
5. 维纳预测器
概念:已知
一般的
5.1 N步因果纯预测器
令预测器期望输出为
做
将其带入3.2节中带白化滤波的因果IIR滤波器
由于
将
注意这里
解题的过程中,要灵活运用
N步纯预测器的最小均方误差为
这里就不做详细推导了。
5.2 一步线性预测
转换一下N步线性预测的概念,令
预测值
为了后续表示方便,我们改变一下滤波器系数的表示方式,令
为了使MSE最小,同样采取对系数求偏导的方法,经过一系列运算最终可以得到如下矩阵方程
该方程称为Yule-Walker方程,其中
6. 新息
定义:实际观测值与预测值的差值定义为新息,用数学表达实际上就是不带绝对值的L1距离。
若从起点
性质1:
性质2:
性质3: