数字图像处理笔记-第三章:图像变换
3. 图像变换
3.1 图像变换的基本概念
线性空间中,如果
是向量
若
则称
3.2 图像的几何变换
几何变换是最通用的变换之一,例如平移、旋转、裁剪等,这些效果展示目前基本都已经集成到了手机的相片编辑系统中。
3.2.1 平移变换
假设平移前坐标为
3.2.2 比例缩放
设
3.2.3 旋转变换
将输入图像绕笛卡尔坐标系原点旋转
思考:旋转变换矩阵的n次方是什么?
从旋转的物理意义出发,每乘以一个旋转矩阵,就相当于将原图像旋转了
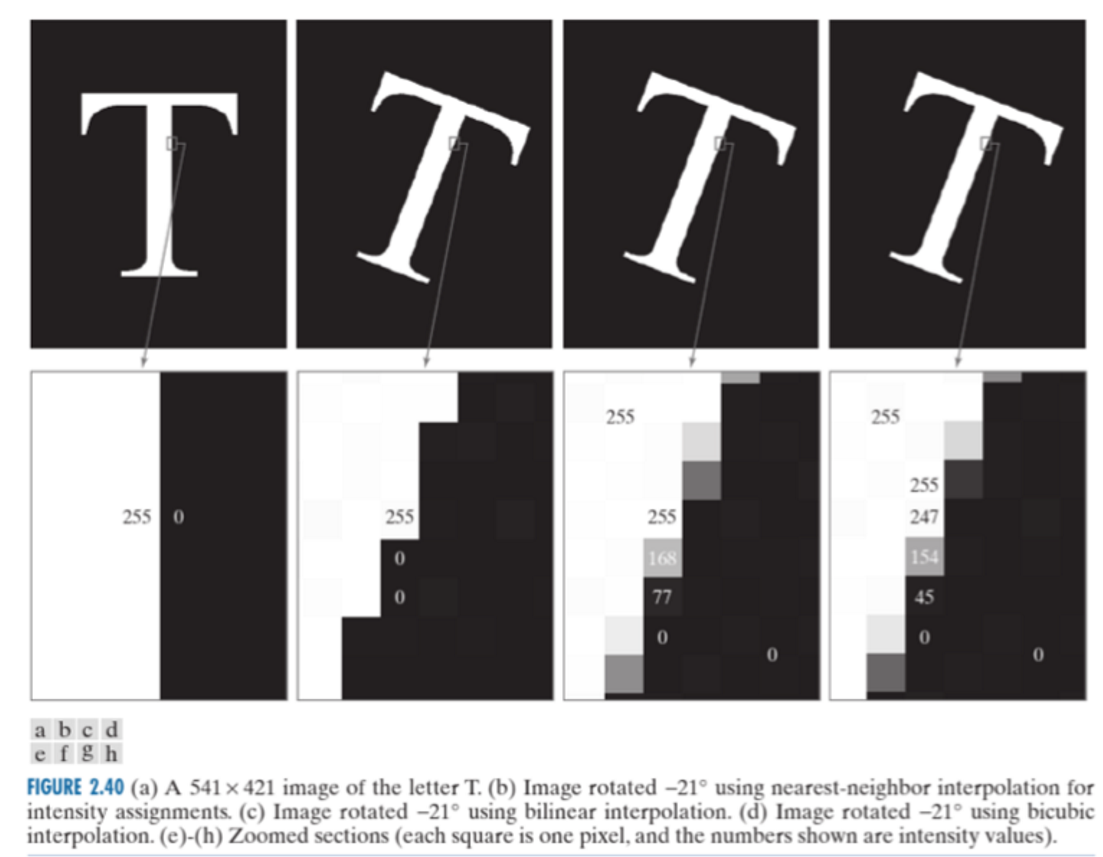
需要注意的是,对于图像的旋转操作会由于图像空间量化误差而造成信息上的损失,如下图所示
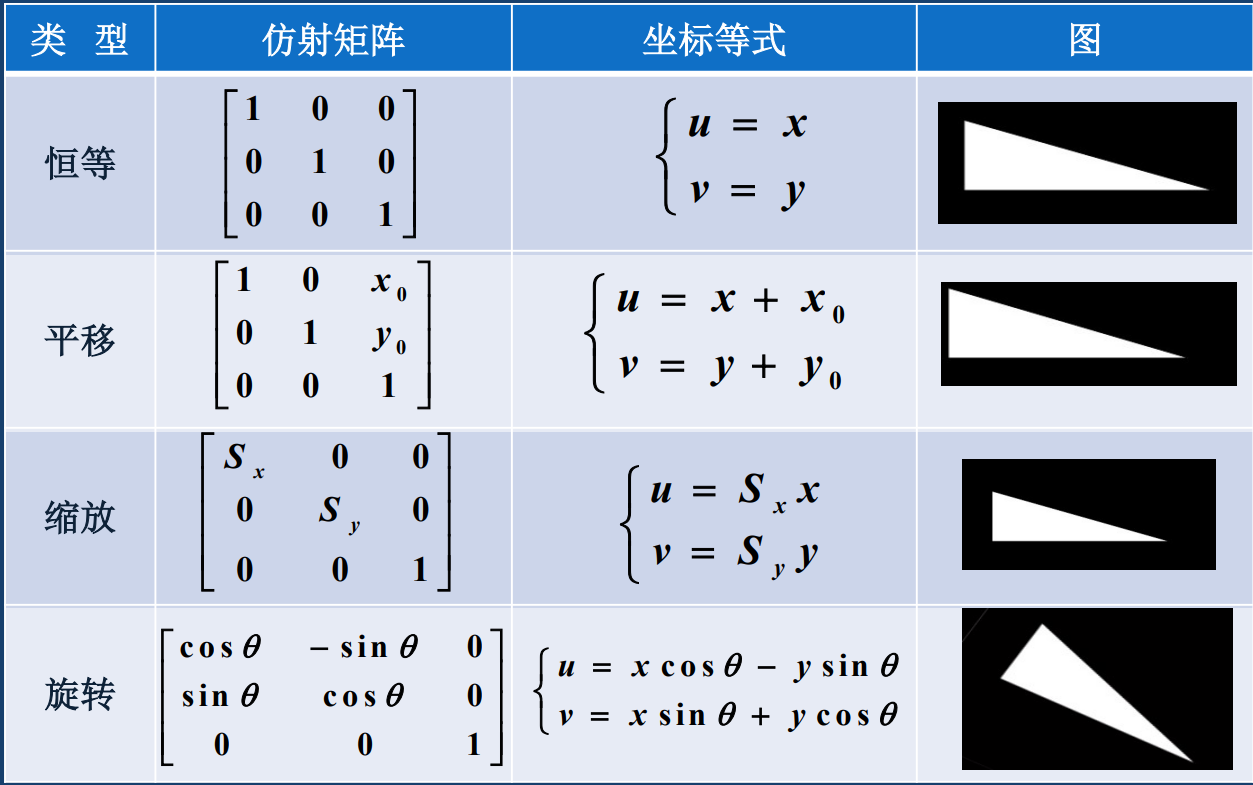
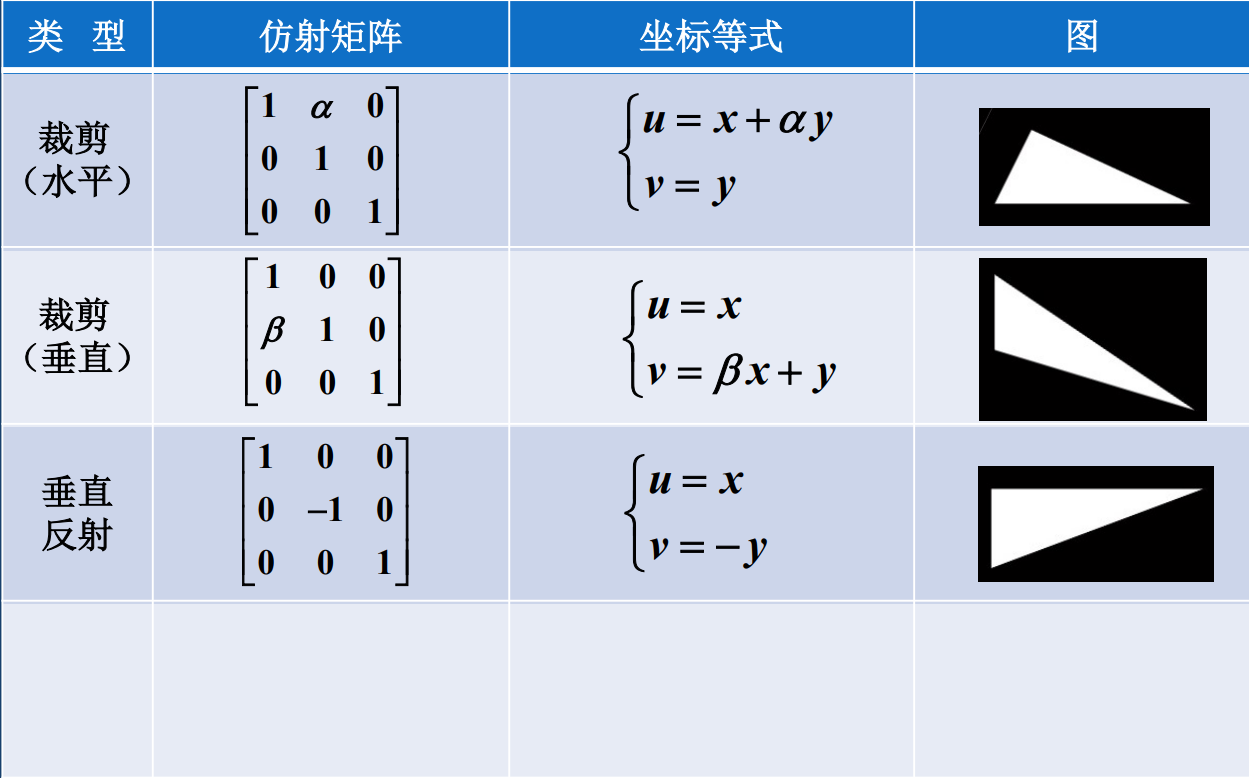
3.2.4 仿射变换
仿射变换是前面几种变换一般形式,仿射变换具有:
- 平直性,即变换前后都是直线
- 平行性,即变换前后平行的线仍然平行
仿射变换的一般表达式为
通常,仿射变换都会将变换矩阵与坐标增广一个维度,如下所示:
这样做的好处是将仿射变换矩阵变为了方阵,可以进行矩阵的连乘,即多个仿射变换连续进行。
仿射变换的性质:
- 仿射变换只有6个自由度,对应矩阵前两行的6个元素,因此仿射变换可以保证变换前后平行的直线仍然是平行,三角形仍然是三角形,但不能保证四边形以上的多边形映射仍为多边形
- 仿射变换的乘积和逆变换都是仿射变换
3.2.5 透视变换
与仿射变换不同,透视投影按照桶投影中心这一点出发的直线将物体投影到图像平面。透视变换矩阵表达式为
透视变换有9个自由度,因此可以实现平面四边形到四边形的映射。
3.3 图像插值
3.3.1 最邻近插值
最邻近插值也叫零阶插值,也就是令变换后像素的灰度值等于它最近的输入像素的灰度值。最邻近插值输入输出关系为简单的比例关系,
这里直接给出最邻近插值的Python代码
1 |
|
最邻近插值计算简单,但若scale比较大时会出现锯齿边缘的效应,插值效果较差。
3.3.2 双线性插值
双线性插值也叫做一阶插值,该方法简而言之就是先沿图像矩阵的行插值,得到结果后再对图像列插值,因此需要至少4个点(行2个,列2个)来进行双线性插值,一张图可以说明这个方法1,先通过
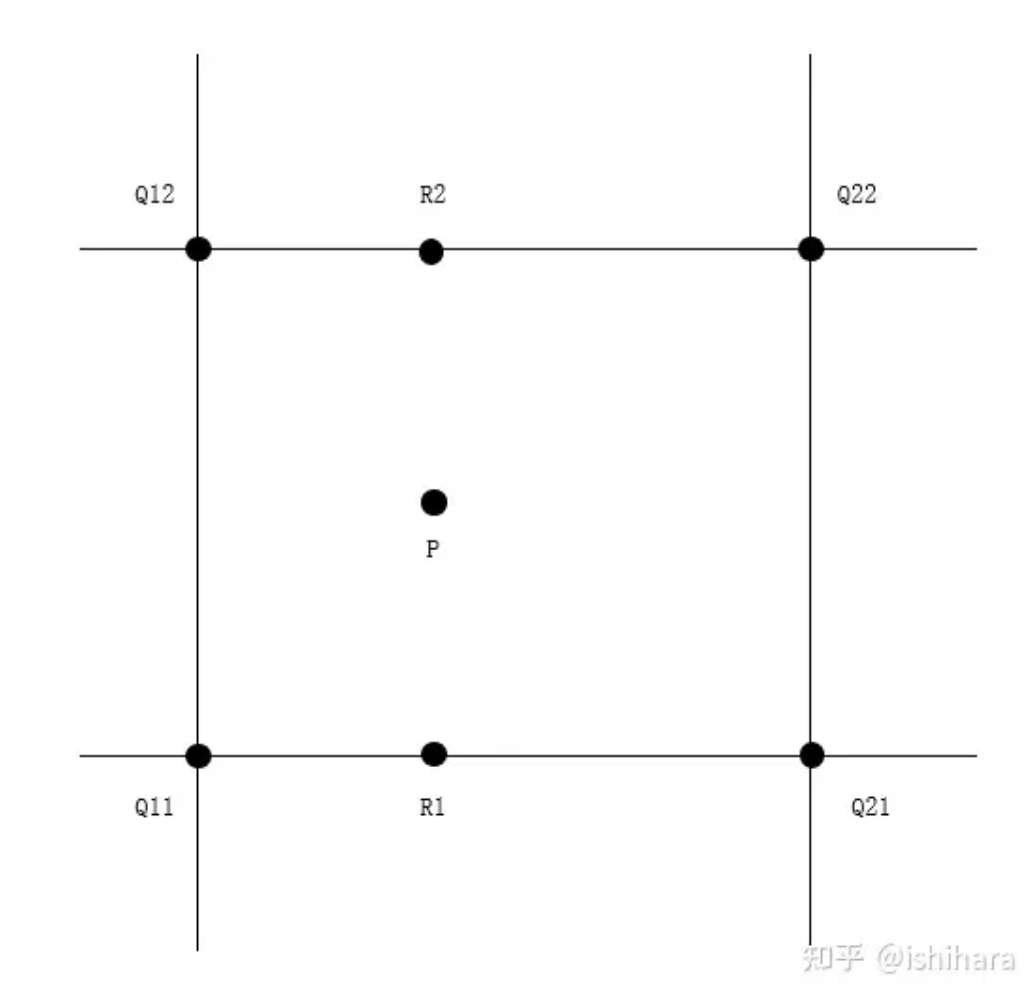
具体公式如下,总体原理是根据
将
同样给出Python代码,实际操作中双线性插值只用相邻4个点(像素位置差1),所以这里分母全为1。
1 |
|
双线性插值的缺点是边界有模糊,因为这样插值相当于对选取的四个点做了加权平均。
3.3.3 卷积插值法
图像放大时,图像像素的灰度值插值可以通过卷积实现,即将输入图像两行两列中间插入0,然后通过低通模板滤波。
3.4 图像的傅里叶变换
3.4.1 回顾1D-DFT
对于有限长序列,
将上述表达式转化为矩阵表达式:
其中,
此外,还可以证明
因此有
而1D-DFT则为正交变换,正交变换的反变换可用该矩阵表示
3.4.2 2D-DFT
2D-DFT是对1D-DFT的扩展,公式如下
3.4.3 2D-DFT的性质
重点
可分离性、移位性、频谱中心化、尺度变换和平均值考试请务必牢记
| 性质 | 描述 | 数学表达式 |
|---|---|---|
| 变换核可分离性 | 2D-DFT相当于先对行(或列)做一维DFT,再对列(或者行)一维DFT | |
| 移位性 | 分为空间移位、频域移位,移位前后幅度不变 | 空间移位: |
| 频谱中心化 | 对于 |
|
| 旋转不变性 | 空域中旋转角度 |
|
| 卷积定理 | 空域卷积<=>频域相乘,频域卷积<=>空域相乘,需要注意的是需要先将 |
|
| 周期性 | 2D-DFT变换前后是周期的 | |
| 共轭对称性 | 若图像 |
|
| 线性 | 傅里叶正反变换都是线性变换 | |
| 尺度变换 | 空域相乘,频域相除还要除以放缩尺度的乘积 | |
| 实偶函数DFT | 仅有余弦实部,奇部求和为0 | |
| 实奇函数DFT | 仅有正弦虚部,偶部求和为0 | |
| 平均值 | 对整幅图像求平均,相当于 |
|
| 相关定理 | 空域互相关<=>频域滤波器变为共轭相乘,反之亦然 | |
3.5 图像变换的一般表示形式
3.5.1 图像变换一般表达式
图像的变换多种多样,仿射变换和傅里叶变换只是其中的两个例子,我们可以用一般形式表达图像变换:
其中
3.5.2 正交变换
上述表达式的正变换可以用矩阵形式记为
其中
- 若实数方阵
满足 ,则 为正交矩阵 - 若复数方阵
满足 ,则 为酉矩阵
正交矩阵(酉矩阵)性质如下
| 性质 | 描述 |
|---|---|
| 逆与转置 | |
| 正交归一 | 正交矩阵始终有:行模=列模=1,且不同行列向量之间正交 |
| 行列式 | 正交矩阵行列式 |
| 反身性 | 若 |
| 矩阵连乘 | 若 |
变换矩阵为正交(或酉)矩阵的变换称为正交变换,如2D-DFT即为正交变换 二维正交变换同样遵循帕西瓦尔定理(Parseval law),即空域上图像的平方和等于频域上频谱的平方和
3.5.3 可分离变换
若变换(或反变换)
如果一个变换核是可分离的,那么一个二维可分离变换可由两个一维变换完成,例如2D-DFT。如果将变换矩阵
如果
因为
由于DFT是复数运算,运算量大,不便于实时处理,所以通过构造函数使其变为偶函数,偶函数的2D-DFT仅含余弦实部,形成的变换又称为离散余弦变换(Discrete Cosine Transform, DCT)。
3.6 离散沃尔什-哈达玛变换
重点
沃尔什-哈达玛变换(Walsh-Hadamard Transform)的变换矩阵由+1和-1组成,对应两个数值逻辑状态,计算机更容易实现。图像数据越是均匀分布,经过沃尔什-哈达玛变换后的数据越集中在矩阵边角,因此沃尔什变换可以集中图像能量,把一个矩阵的非零元素压缩到边角上,可以用于压缩图像信息编码。
3.6.1 哈达玛变换
哈达玛矩阵可分为多阶递推矩阵,其中最低阶矩阵为
递推矩阵为
最低阶矩阵及其递推矩阵需记忆
如二阶哈达玛矩阵
注意矩阵
哈达玛变换核有3条性质:
| 性质 | 描述 |
|---|---|
| 递推性 | |
| 正交性 | 哈达玛变换矩阵为实正交对称矩阵,即 |
| 变号次数 | 行列变号次数乱序 |
根据第二条性质和3.5.3节中的公式,二维哈达玛变换及其反变换可以写为
3.6.2 沃尔什变换
沃尔什变换是由哈达玛变换矩阵经过矩阵的初等变换(行变换)得到的。具体而言,就是将哈达玛变换的行重新排列,使得行的变号次数依次递增。
例如
变号次数依次为0,1,2,3。
沃尔什变换也具有3条性质
| 性质 | 描述 |
|---|---|
| 递推性 | |
| 正交性 | 哈达玛变换矩阵为实正交对称矩阵,即 |
| 变号次数 | 行列变号次数依次递增 |
同样根据正交性和3.5.3节中的公式,二维沃尔什变换及其反变换可以写为
图像越平坦,经过沃尔什-哈达玛变换之后能量就越集中
3.7 KL变换
KL变换是基于图像统计特性的变换。KL变换能充分去除相关性,把有用的信息集中到数目尽可能少的主分量当中。
3.7.1 图像的统计参数
将一个
图像的协方差
其中,
在有
因为协方差矩阵一定是实对称方阵(见随机信号处理第一章笔记),因此
3.7.2 离散KL变换
KL变换可以分为如下四步
第一步:计算图像集合的均值向量
第二步:计算
第三步:计算变换矩阵
第四步:计算KL变换
有了变换矩阵之后,KL变换表达式为
变换后图像
由此可见,KL变换对每个图像都要重新计算变换矩阵,因此KL变换不具备普适性。
3.7.3 KL变换的性质
性质1:因为
性质2:由于二维KL变换核时不可分离的,所以KL变换是不可分离变换
4.7.4 主成分分析(Principal Components Analysis, PCA)
由于变换矩阵大小
PCA的核心思想是,图像能量主要集中在特征值较大的系数中,因此只用前
则新的变换为
这个式子的意义为用
https://zhuanlan.zhihu.com/p/141681355↩︎